![[gml logo]](../../images/cubes.png)
Home Page
Toolkit Overview
Using GML
User Input Services
Finger Tracker
Calibrator
Frame Grabber
Service protocol
Obtaining GML
Installing GML
Licence
Developer Documentation
Tcl/Tk API
The GML Canvas
Image processing
Tcl Scripts Library
List of Classes
List of Files
C/C++ API
List of Classes
List of Files
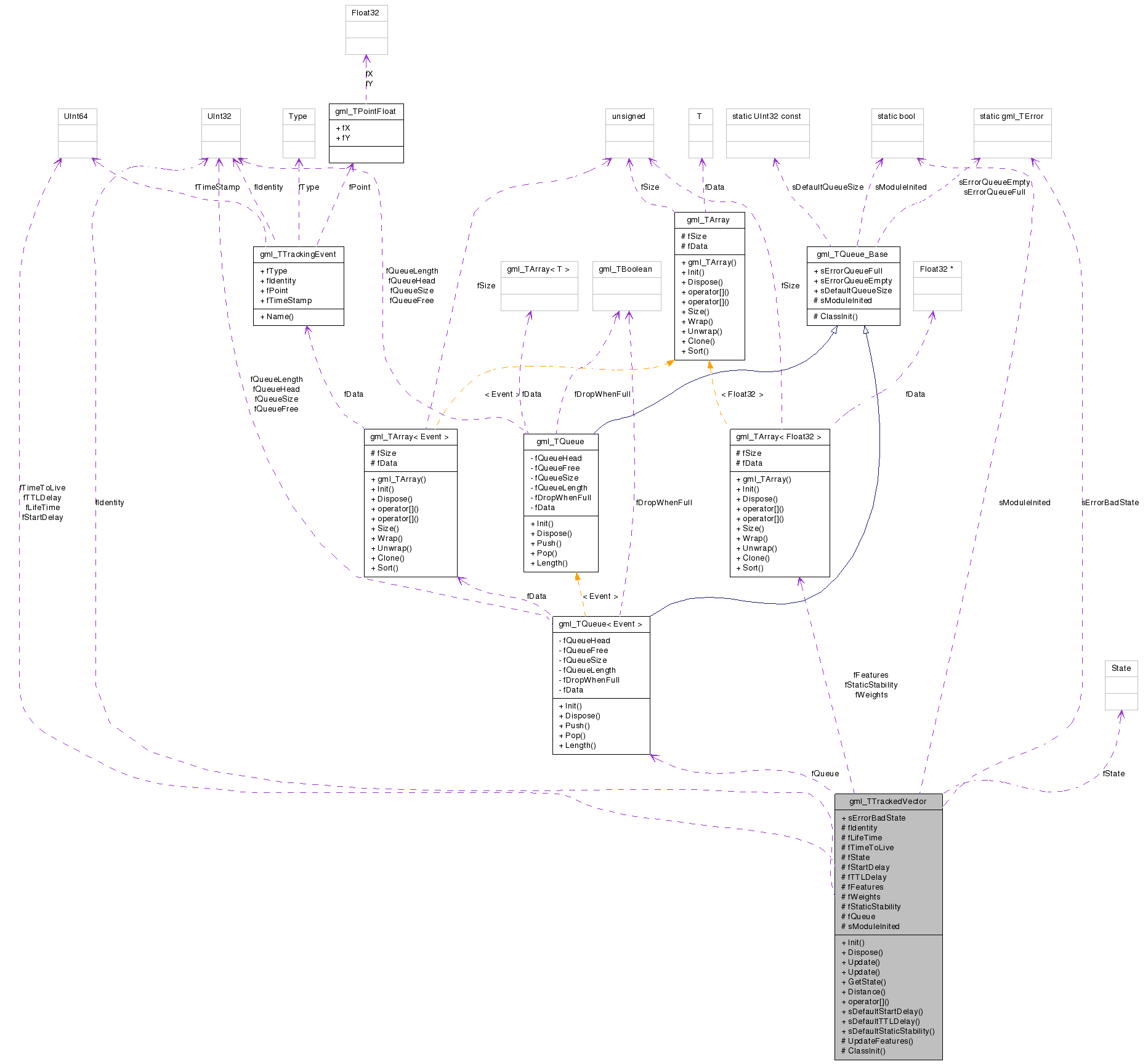
gml_TTrackedVector Class Reference
#include <gml_TrackedVector.h>
Collaboration diagram for gml_TTrackedVector:
Detailed Description
Representation of objects tracked in 2D by the gml_TTracker class.
Public Types | |
| enum | State { Born, Alive, Zombie, Dead } |
| Internal tracking state of a tracked object. More... | |
| typedef gml_TQueue< Event > | EventQueue |
| Queues of tracking events. | |
Public Member Functions | |
| gml_TError | Init (gml_TArray< Float32 > &features, gml_TArray< Float32 > &weights, gml_TArray< Float32 > &stability, EventQueue &queue, UInt64 startDelay=sDefaultStartDelay(), UInt64 ttlDelay=sDefaultTTLDelay()) |
| Setup tracked object data. | |
| void | Dispose (UInt64 time) |
| gml_TError | Update (UInt64 gap, UInt64 time, gml_TArray< Float32 > &features) |
| Update object's state and possibly generate events; this version is used when the object has been detected (i.e. a feature vector has been measured). | |
| gml_TError | Update (UInt64 gap, UInt64 time) |
| Update object's state and possibly generate events; this version is used when the object has not been detected (i.e. a feature vector has not been measured). | |
| State | GetState () |
| Return the current state of the tracked object. | |
| Float32 | Distance (gml_TArray< Float32 > &otherFeatures) |
| Return the distance to another set of features. May return 0 or FLT_MAX. | |
| Float32 | operator[] (unsigned k) |
| Bracket. | |
Static Public Member Functions | |
| static UInt64 | sDefaultStartDelay () |
| default for fStartDelay | |
| static UInt64 | sDefaultTTLDelay () |
| default for fTTLDelay | |
| static Float32 | sDefaultStaticStability () |
| default for fStaticStability | |
Static Public Attributes | |
| static gml_TError | sErrorBadState = (gml_TError)-1 |
Protected Member Functions | |
| void | UpdateFeatures (gml_TArray< Float32 > &newFeatures) |
Static Protected Member Functions | |
| static void | ClassInit () |
| class setup | |
Protected Attributes | |
| UInt32 | fIdentity |
| UID of the object. | |
| UInt64 | fLifeTime |
| time since the object was born (relevant while in Born state) | |
| UInt64 | fTimeToLive |
| remaining lifetime of the object (relevant while in Zombie state) | |
| State | fState |
| current object state | |
| UInt64 | fStartDelay |
| time after which a consistently detected object will be tracked (nanoseconds). < i.e. delay for the Born -> Alive transition | |
| UInt64 | fTTLDelay |
| time after which an object will die if undetected (nanoseconds). < i.e. delay for the Zombie -> Dead transition | |
| gml_TArray< Float32 > | fFeatures |
| tracked object's current feature vector | |
| gml_TArray< Float32 > & | fWeights |
| weight of features when comparing feature vectors | |
| gml_TArray< Float32 > & | fStaticStability |
| threshold under which object motion is discarded (for each feature) | |
| EventQueue & | fQueue |
| queue in which to push the tracking events | |
Static Protected Attributes | |
| static bool | sModuleInited = false |
| was ClassInit() called ? | |
Classes | |
| struct | Event |
| Type of events that can occur during tracking. More... | |
Member Enumeration Documentation
| enum State |
Internal tracking state of a tracked object.
Possible state transitions:
.-> Alive <--> Zombie -,
Born -| |-> Dead
'----------------------'
Member Function Documentation
| gml_TError Init | ( | gml_TArray< Float32 > & | features, | |
| gml_TArray< Float32 > & | weights, | |||
| gml_TArray< Float32 > & | stability, | |||
| EventQueue & | queue, | |||
| UInt64 | startDelay = sDefaultStartDelay(), |
|||
| UInt64 | ttlDelay = sDefaultTTLDelay() | |||
| ) |
Setup tracked object data.
- Parameters:
-
queue where to push the events startDelay see fStartDelay ttlDelay see fTTLDelay
| gml_TError Update | ( | UInt64 | gap, | |
| UInt64 | time, | |||
| gml_TArray< Float32 > & | features | |||
| ) |
Update object's state and possibly generate events; this version is used when the object has been detected (i.e. a feature vector has been measured).
- Parameters:
-
gap since when (in nanoseconds) ? time the current timestamp (nanoseconds) features the current object features (or an empty vector)
| gml_TError Update | ( | UInt64 | gap, | |
| UInt64 | time | |||
| ) |
Update object's state and possibly generate events; this version is used when the object has not been detected (i.e. a feature vector has not been measured).
- Parameters:
-
gap since when (in nanoseconds) ? time the current timestamp (nanoseconds)
| Float32 operator[] | ( | unsigned | k | ) | [inline] |
Bracket.
Inspect feature values.
The documentation for this class was generated from the following files:
- vision/gml_TrackedVector.h
- vision/gml_TrackedVector.cc
Generated on Tue Jun 12 14:03:28 2007 for gml by
Doxygen 1.5.2.
Copyright (c) 2000-2007 CLIPS-IMAG Laboratory, Grenoble, France. All rights reserved.
W3CXHTML 1.0 W3CCSS 2.0